/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include"main.h" #include"usart.h" #include"gpio.h"
/* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include<stdio.h> /* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */ SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART2_UART_Init(); /* USER CODE BEGIN 2 */ HAL_UART_Transmit(&huart2, (uint8_t *)"hello,world!", sizeof("hello,world!"), 0xff); /* USER CODE END 2 */
/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */
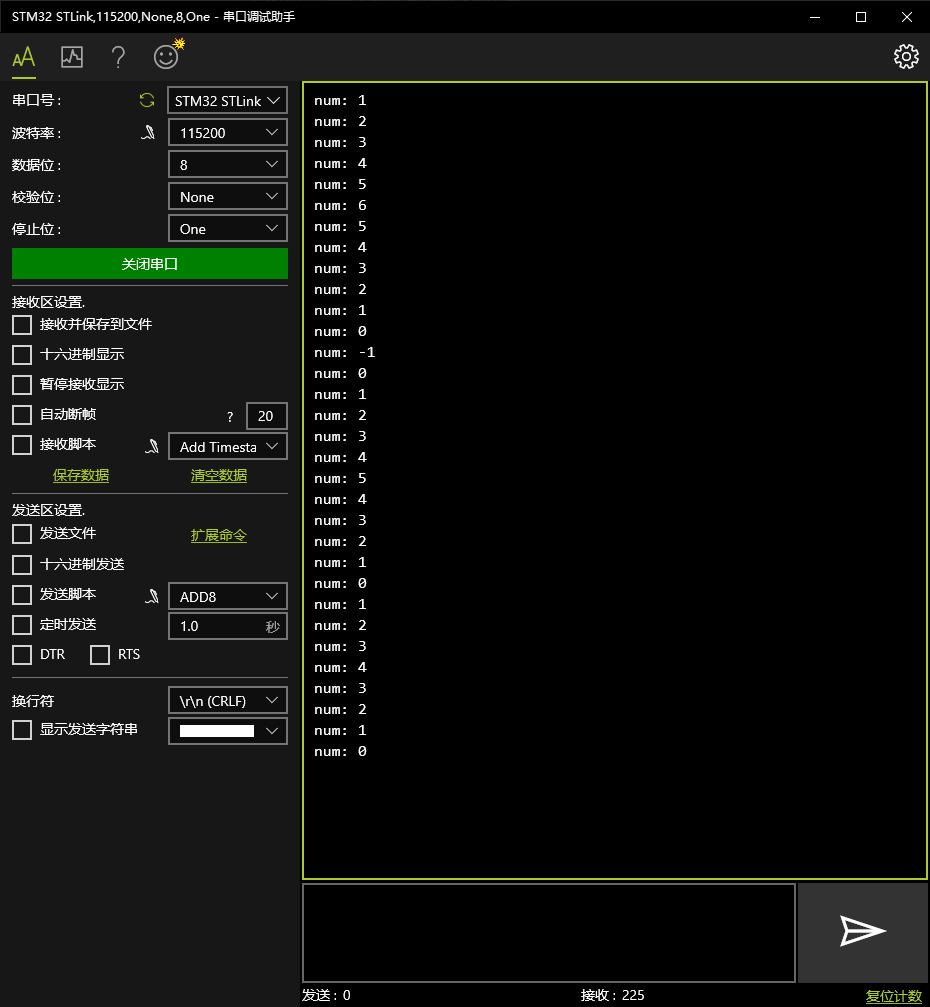
/* USER CODE BEGIN 3 */ if (dir_flag != 2) { dir_flag = 2; printf("num: %d\n", test_num); }
/** * @brief This function is executed in case of error occurrence. * @retval None */ voidError_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ }
#ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ voidassert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif/* USE_FULL_ASSERT */
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file stm32f4xx_it.c * @brief Interrupt Service Routines. ****************************************************************************** * @attention * * Copyright (c) 2022 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/ #include"main.h" #include"stm32f4xx_it.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ externuint8_t key_click_flag; externuint8_t key_count; /* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/ /* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */
/******************************************************************************/ /* Cortex-M4 Processor Interruption and Exception Handlers */ /******************************************************************************/ /** * @brief This function handles Non maskable interrupt. */ voidNMI_Handler(void) { /* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */ /* USER CODE BEGIN NonMaskableInt_IRQn 1 */ while (1) { } /* USER CODE END NonMaskableInt_IRQn 1 */ }
/** * @brief This function handles Hard fault interrupt. */ voidHardFault_Handler(void) { /* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_HardFault_IRQn 0 */ /* USER CODE END W1_HardFault_IRQn 0 */ } }
/** * @brief This function handles Memory management fault. */ voidMemManage_Handler(void) { /* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */ /* USER CODE END W1_MemoryManagement_IRQn 0 */ } }
/** * @brief This function handles Pre-fetch fault, memory access fault. */ voidBusFault_Handler(void) { /* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_BusFault_IRQn 0 */ /* USER CODE END W1_BusFault_IRQn 0 */ } }
/** * @brief This function handles Undefined instruction or illegal state. */ voidUsageFault_Handler(void) { /* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */ while (1) { /* USER CODE BEGIN W1_UsageFault_IRQn 0 */ /* USER CODE END W1_UsageFault_IRQn 0 */ } }
/** * @brief This function handles System service call via SWI instruction. */ voidSVC_Handler(void) { /* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */ /* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */ }
/** * @brief This function handles Debug monitor. */ voidDebugMon_Handler(void) { /* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */ /* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */ }
/** * @brief This function handles Pendable request for system service. */ voidPendSV_Handler(void) { /* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */ /* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */ }
/** * @brief This function handles System tick timer. */ voidSysTick_Handler(void) { /* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */ HAL_IncTick(); /* USER CODE BEGIN SysTick_IRQn 1 */ // led_blink(100); if(key_click_flag) { key_count++; } /* USER CODE END SysTick_IRQn 1 */ }
/******************************************************************************/ /* STM32F4xx Peripheral Interrupt Handlers */ /* Add here the Interrupt Handlers for the used peripherals. */ /* For the available peripheral interrupt handler names, */ /* please refer to the startup file (startup_stm32f4xx.s). */ /******************************************************************************/
/** * @brief This function handles EXTI line[9:5] interrupts. */ voidEXTI9_5_IRQHandler(void) { /* USER CODE BEGIN EXTI9_5_IRQn 0 */
/* USER CODE END EXTI9_5_IRQn 0 */ HAL_GPIO_EXTI_IRQHandler(EC11_A_Pin); HAL_GPIO_EXTI_IRQHandler(EC11_KEY_Pin); /* USER CODE BEGIN EXTI9_5_IRQn 1 */